Equipment
Equipment available for users in the Robotics Manipulator Lab:
| 1. |

|
3-Finger Gripper: versatile robotic end-effector designed for industrial automation and research applications. |
| 2. |

|
Baxter: humanoid robot with 2 7-axis arms and easy-to-program interface for human-robot collaboration and machine learning applications. |
| 3. |

|
Geomagic Touch: a high-precision haptic device that provides force feedback, enabling users to interact with virtual objects through touch. |
| 4. |

|
Kuka iiwa: collaborative robotic arm with high sensitivity and torque-controlled joints, designed for safe human-robot interaction in tasks requiring precision and adaptability. |
| 5. |

|
Sawyer: single-arm robotic platform from Rethink Robotics, designed for research and automation, featuring force sensing, adaptive control, and an intuitive interface for advanced manipulation tasks. |
| 6. |
|
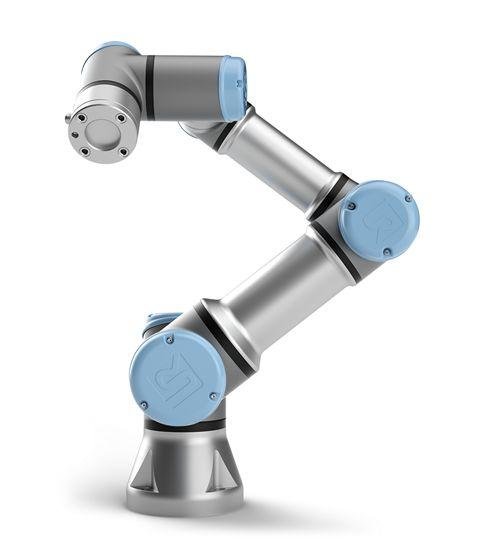
UR3e arm: collaborative robotic arm from Universal Robots, featuring a 3 kg payload, 360-degree joint rotation, and built-in force/torque sensing for precise and flexible automation in small-scale applications. |
| 7. |

|
UR5e arm: collaborative robotic arm from Universal Robots, offering a 5 kg payload, advanced force/torque sensing, and easy programming for precise automation in medium-duty tasks like assembly, pick-and-place, and testing. |